2 Eksenli Robot Kol Yapımı

3 Boyutlu Akilli Arduino Robot Kol Yapimi

3d Yazicidan Robot Kol Yapimi Proje Hocam
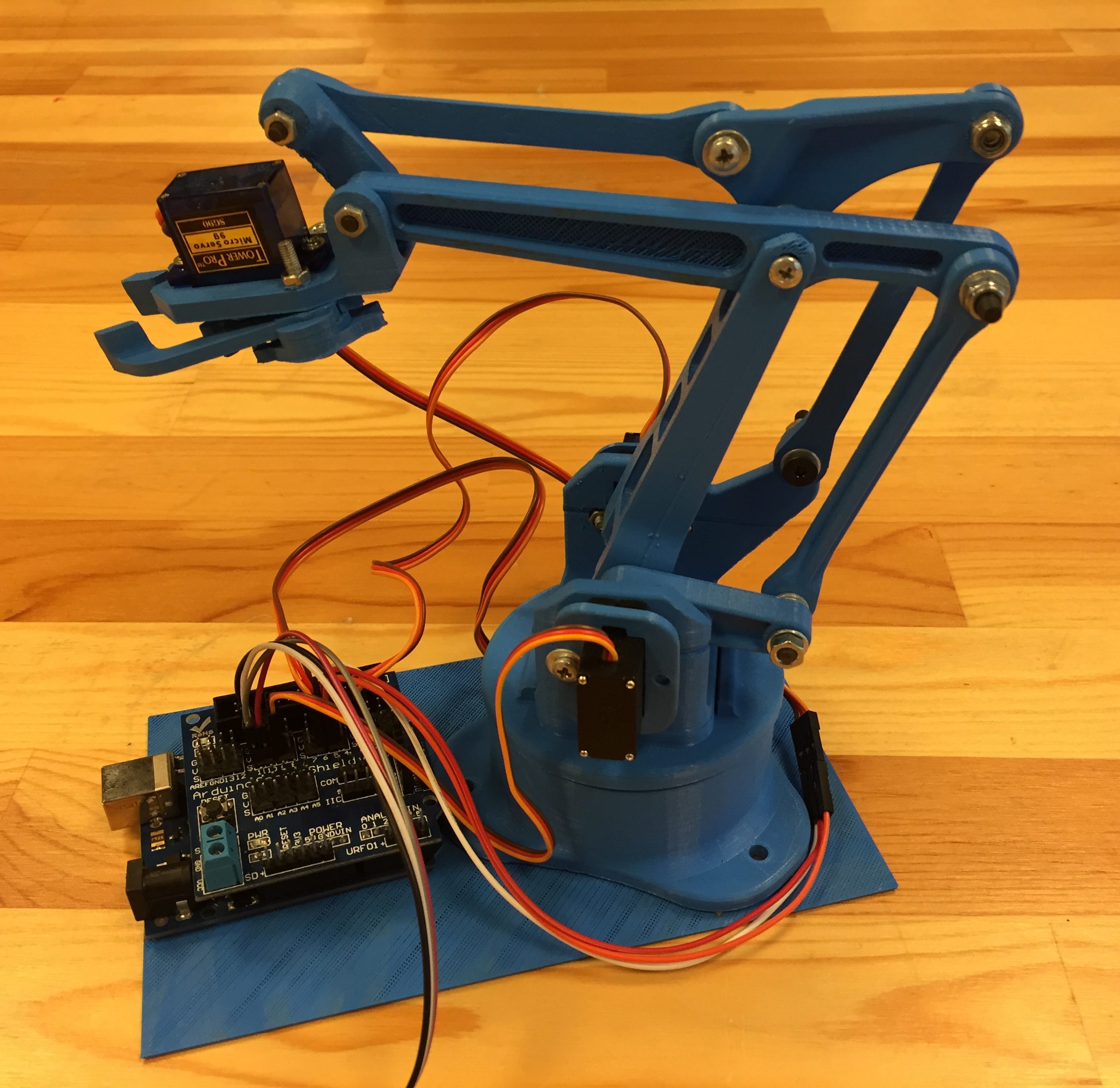
3 Boyutlu Akilli Arduino Robot Kol Yapimi

Ogrenme Fonksiyonuna Sahip Hareket Kopyalayan Robot Kol Yapimi

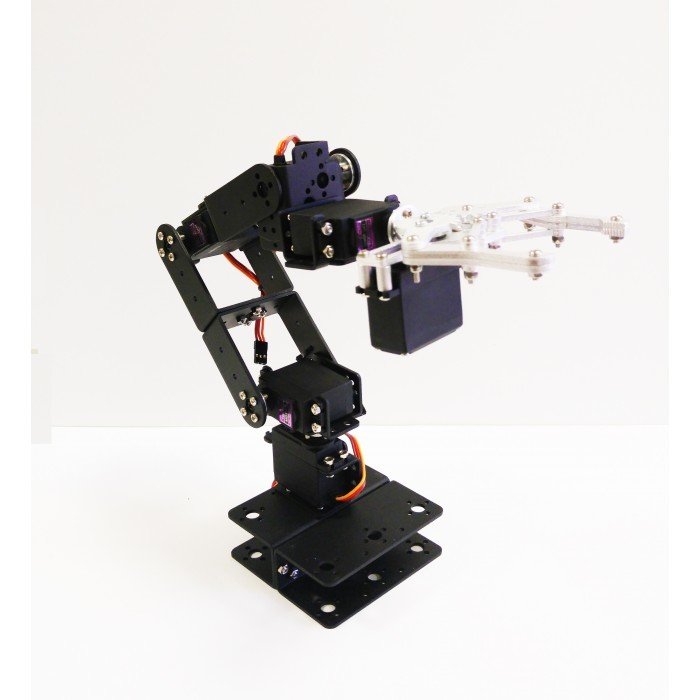
5 Eksen Robot Kol Stajyer Blog

3d Yazicidan Robot Kol Yapimi Proje Hocam
Eksenli mobil bir robot uygulaması ve prototip üretimi gerçeklenmiştir.
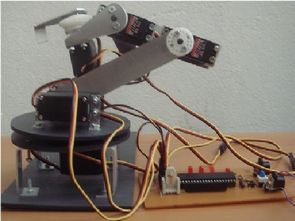
2 eksenli robot kol yapımı. Kumanda kolu hangi konumda olursa olsun kol çalışır. Robot kolumuzda 2 adet nema 23 2 adet nema 17 1 adet nema 14 ve 1 adet de servo motor kullanıldı. Kendi robotunu yap projelerimizin bu bölümünde arduino ile kendini dengeleyen robot yapacağız yapacağımız denge robotunu android cihazdan da kontrol edebileceğiz robotumuzun kontrol sisteminden bahsedecek olursak dengede durması için gyro sensörden gelen açı analiz edilir ve pid kontrol sistemiyle açıya göre motorlara ivmelenme vererek dengeyi sağlar kullanacağımız. 4 servo motor ise yaklaşık 1 amper akım ister.
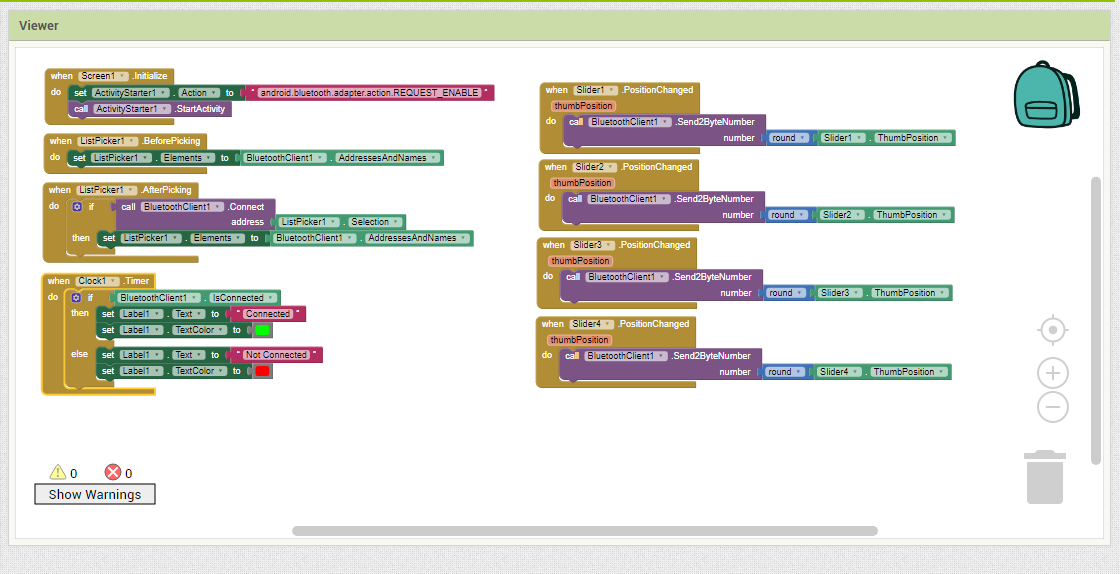
Makalede tasarım adımları detaylı olarak anlatılmakta benzetim ve test sonuçları verilmektedir. Arduino 5v dc ve gnd pinlerine hakim fakat bir arduinodan maksimum 200ma akım çekersiniz. Bu yazımızda android işletim sistemli akıllı cihazlar tarafından kontrol edilebilen robot kol uygulaması yapacağız. Mobil robot kolu mobil robot kolu 5 serbestlik derecesine sahip robot kolu ve ultrasonik sensör monte edilmiş mobil araçtan oluşmaktadır.
Eksen kontrolleri için 3d printer kontrol kartı olan ve yaygın olarak kullanılan ramps kartının v1 4 modelini kullandık. Nema 17 lerden birisi 60mm uzunluğunda birisi 40mm 5 1 redüktörlüydü. Kapağı aşağı doğru iterseniz anahtarın kafasını aşağı doğru iten bir kol görebilirsiniz. 2 eksenli joystick ayrıca kapağı aşağı doğru bastırdığınızda etkinleşen bir anahtar içerir.
Meraklı mühendis 14 280 views. Robot kol yapımı montajına başlamadan önce servo motor bağlantılarını gösteren fritzing ile başlayalım servo motor 5v dc gnd ve bilgi pini olmak üzere 3 pini bulunmaktadır. Elimizde olan 4 servolu robot kol için 2 farklı joystick modül ile sistemi kontrol edebiliriz. Joystik modülü x ve y olmak üzere iki farklı düzlemde 0 ile 1023 arası değer veren ve üzerinde bir adet buton olan sistemdir.
4 eksenli robot kol ürün taşıma duration. Anahtar joystick in arkasındaki küçük siyah kutudur. Robot kolumuz 3d yazıcıdan çıkartmış bulunuyoruz toplam baskı saati 22 saat civarında 200 mikronda yazdırdığımız da 100 250 gram filament harcamış bulunuyoruz robot. Robot kol yapımı ve çeki̇li̇ş var.
3 boyutlu akıllı arduino robot kol yapımı merhaba arkadaşlar.

Basit Robot Yapimi Nasil Yapilir Robot Kol Bolum 1 2 Youtube

5 Eksen Robot Kol Stajyer Blog
6 Eksen Robot Kolu 6 Dof Servo Robot Kolu Robot Malzemeleri 522 45 Tl Satin Al

4 Eksen Robot Kol Yapimi Ilginc Arduino Projeleri Hayalet Ve Yap

Akilli Telefon Kontrolu Ile Diy Arduino Robot Kol Yapimi Iz Atolye

Robot Kol Proje Hocam
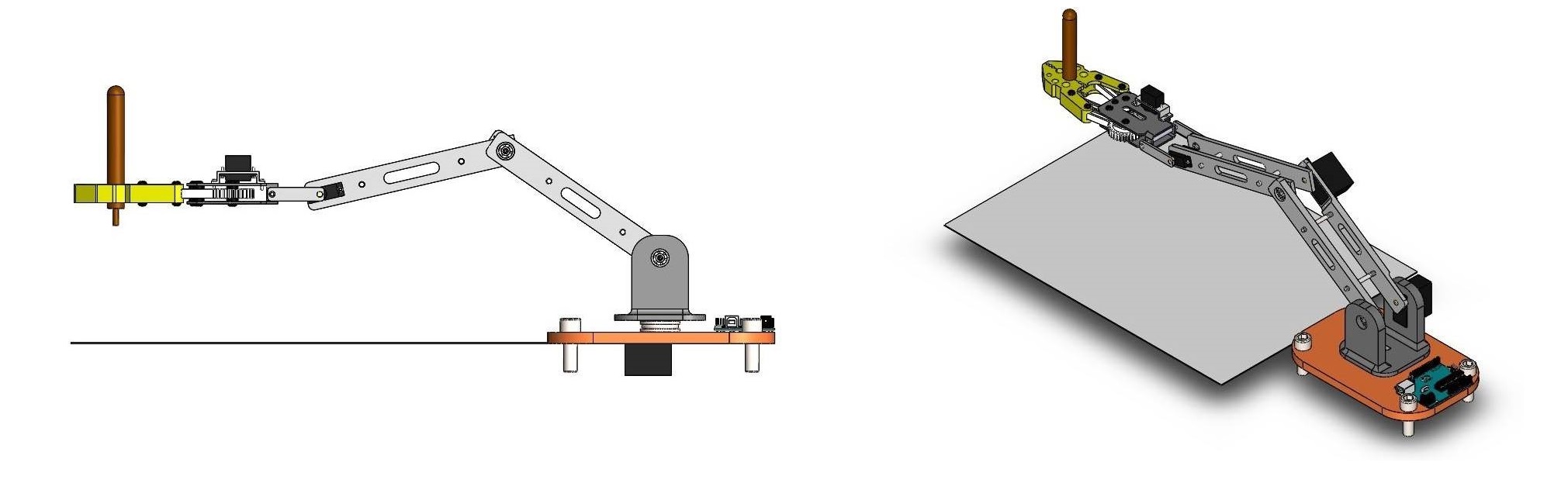
4 1 Eksenli Yazici Robot Kolu Tasarimi Roboturka Com

Ogrenme Fonksiyonuna Sahip Hareket Kopyalayan Robot Kol Yapimi

5 Eksen Robot Kol Stajyer Blog

Mekatronik Robot Kol Projesi

El Hareketiyle Kontrol Edilen 5 Eksen Robot Kol

Robot Kol Yapimi Lazer Kesim Proje Hocam

Akilli Telefon Kontrolu Ile Diy Arduino Robot Kol Yapimi Iz Atolye

Arduino Ve Joystick Ile Robot Kol Kontrolu Combo Proje Hayalet Ve Yap

Arduino Robot Kol Projesi Metin Guven Teknoloji Ve Tasarim Projeleri Basit Proje Fikirleri

5 Eksen Robot Kol Projesi Youtube

5 Eksen Robot Kol Stajyer Blog

Bilgisayar Kontrollu 2 Eksenli Robot Kol Elektronik Devreler Projeler

Seyir Defteri 3 Eksenli Robot Kol
3 Boyutlu Akilli Arduino Robot Kol Yapimi

4 Eksen Robot Kol Yapimi Ilginc Arduino Projeleri Hayalet Ve Yap

Robot Kol Elektronik Devreler Projeler

Robot Kol Yapim 1 Robot Arm Production 1 Youtube
Robot Kol Elektronik Devreler Projeler
