Joystick Ile Robot Kol

Arduino Ile Joystick Kontrollu Robot Kol Youtube

Arduino Ve Joystick Ile Robot Kol Kontrolu Combo Proje Hayalet Ve Yap

Arduino Ve Joystick Ile Robot Kol Kontrolu Combo Proje Hayalet Ve Yap

Arduino Ile Joystick Kontrollu Robot Kol Projesi Nasil Yapilir

Joystick Ile Robot Kol Kontrolu Ve Baski Incelemesi Youtube

4 Eksen Robot Kol Yapimi Ilginc Arduino Projeleri Hayalet Ve Yap

Arduino nano ile robot kol robot arm with arduino nano duration.
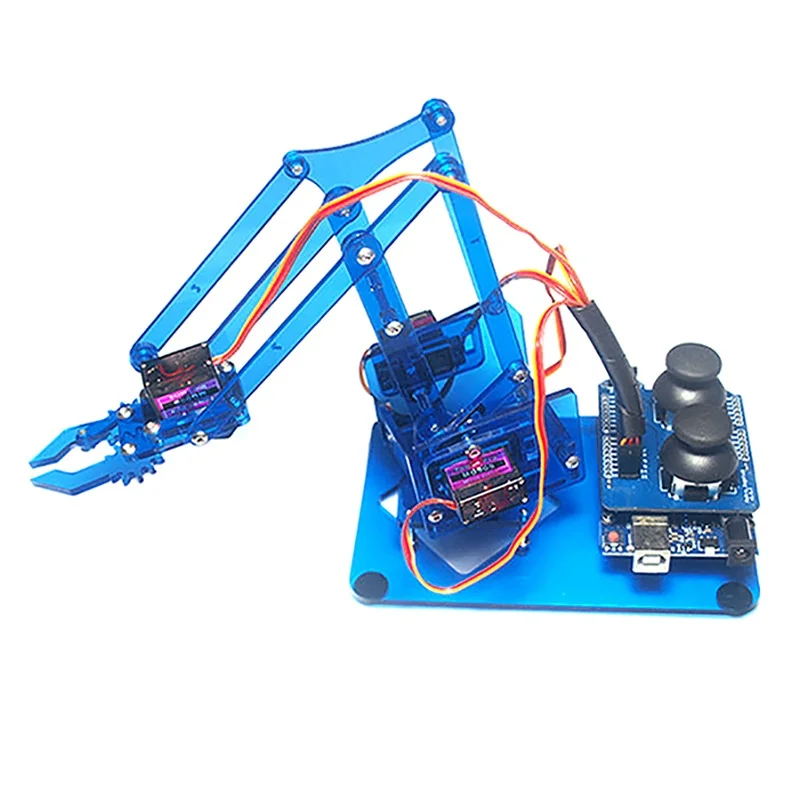
Joystick ile robot kol. Arduino ve joystick ile robot kol kontrolü projemizde öncelikle joystick modül kullanımından bahsedelim. Joystik modülü x ve y olmak üzere iki farklı düzlemde 0 ile 1023 arası değer veren ve üzerinde bir adet buton olan sistemdir. The shield provides a simple analog input with the joystick and four separate buttons. The joystick can be used to control a variety of things such as melody robots or pixels on a screen and the buttons can be used for navigation or game control.
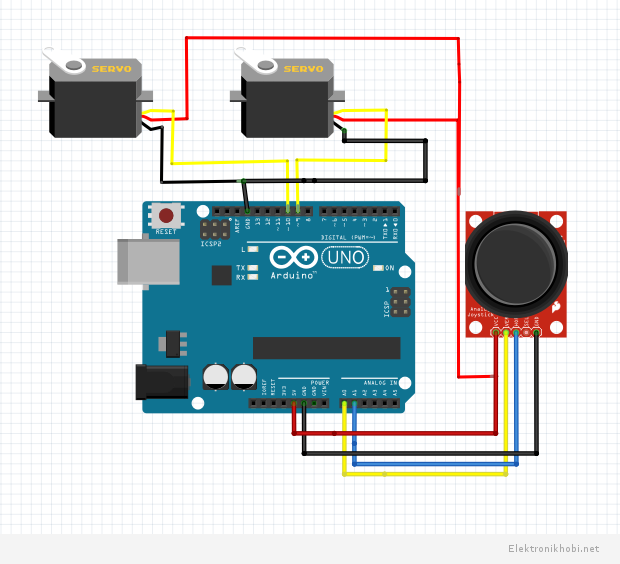
We use the armuno base protio joypad and the robotio nano controller board in this example but you can substitute generic parts. Mert arduino 692 851 views. Arduino joystick project. Joystick potentiometer arduino servo control generic diagram controlling your armuno robotic arm with joysticks follow the illustrated steps below to set up your robot arm to allow control with a couple of joysticks.
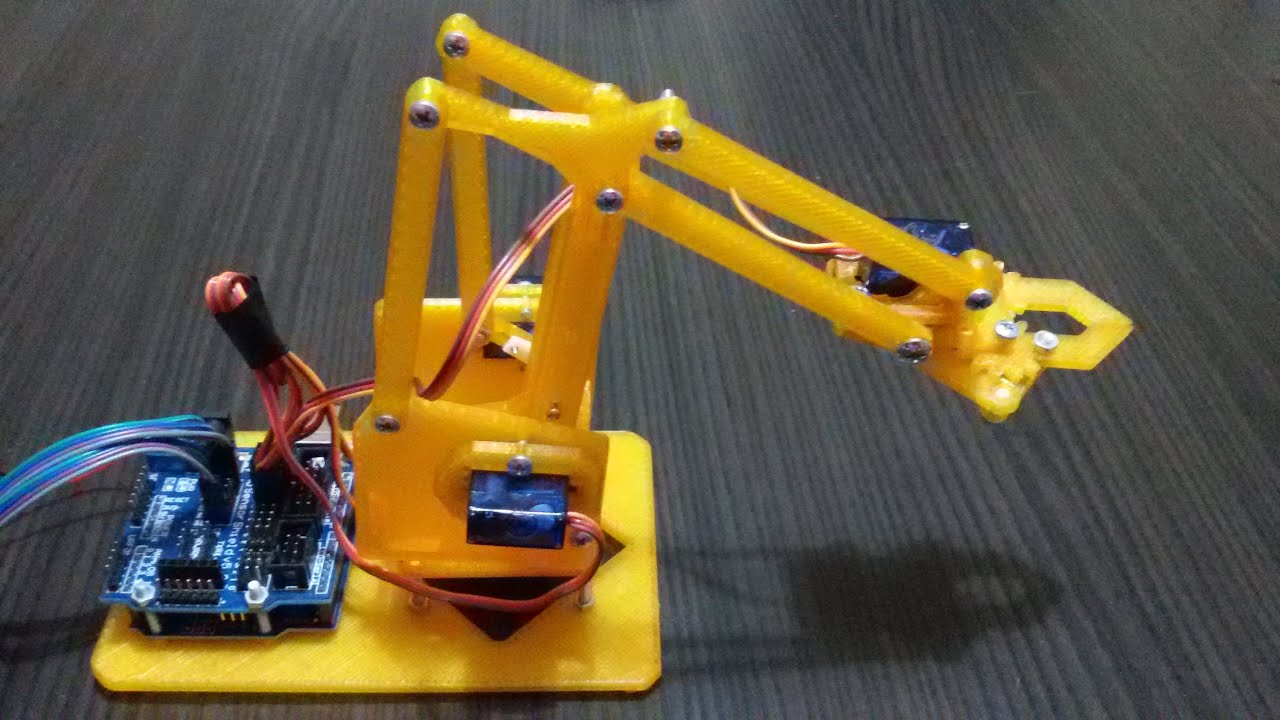
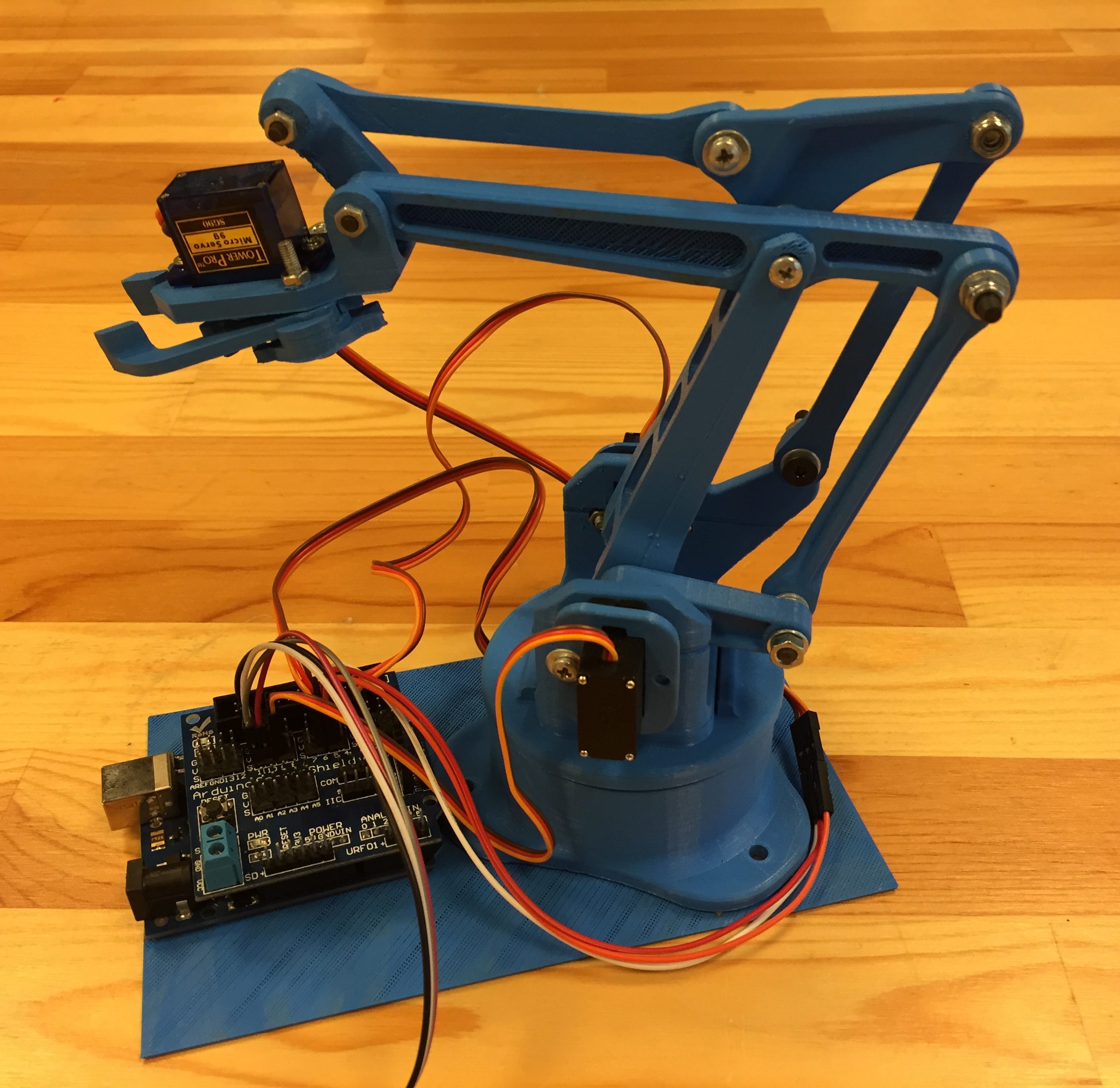
The arduino joystick module provides a value from 0 to 1023 that value can be scaled and turned into a number of degrees from 0 to 180. 3 boyutlu akıllı arduino robot kol yapımı merhaba arkadaşlar. Malzemeleri temin ettikten sonra robot kol montajına başladık montaj gerçekten hiç kolay olmadı uğraştırdı baya diyebilirim çünkü parçalar yazıcıdan çıktıklarında vida yerlerinde yol yoktu bu yolları klavuz yardımıyla veya el ile açmanız gerekiyor montaj yaparken çekmiş olduğumuz bir kaç resmi ekleyeceğim sizde. Arduino süper başlangıç seti.
Elimizde olan 4 servolu robot kol için 2 farklı joystick modül ile sistemi kontrol edebiliriz. Kendi robotunu yap projelerimizin bu bölümünde arduino ile kendini dengeleyen robot yapacağız yapacağımız denge robotunu android cihazdan da kontrol edebileceğiz robotumuzun kontrol sisteminden bahsedecek olursak dengede durması için gyro sensörden gelen açı analiz edilir ve pid kontrol sistemiyle açıya göre motorlara ivmelenme vererek dengeyi sağlar kullanacağımız. The x axis of the joystick will be controlling one of the servos while the y axis will control the other.

Arduino Robot Kol Projemiz Servo Joystick Metin Guven Youtube
Robot Kol Projesi Arduino Youtube

Used Arduino Ile Joystick Kontrollu Robot Kol For Sale In Efeler Letgo

Arduino Ve Joystick Ile Robot Kol Kontrolu Combo Proje Hayalet Ve Yap

Arduino Joystick Ile Servo Motor Kontrolu Proje Hocam

Arduino Ile Robot Kol Yapimi Joysticklerle Kontrol

Kucuk Eller Robot Kol Yapimi

Robotics Arm 6 Axis Joystick Arduino Project Hub

Robot Kol Yapimi Lazer Kesim Proje Hocam

Arduino Projeleri Arduino Ile Joystick Kontrollu Robot Kol Youtube

Arduino Ile Robot Kol Yapimi Muhendisce Bilgiler

Arduino Ile Robot Kol Joystick Lazer Robot Gimto Youtube

El Hareketleriyle Kontol Edilen Robot Kol
Yeni Varis Mearm Diy 4dof Arduino Icin Robot Kol 4 Eksen Doner Kiti Ile Joystick Dugme Denetleyicisi 4 Adet Servo Arm Robot Servo Kitdiy Robot Arm Aliexpress
Joystick Ile Servo Motor Kontroluelektronik Hobi

Mekatronik Robot Kol Projesi

Funssor Diy Mearm Joystick Robot Kol Kiti Mekanik Kol Robot Tutucu Akrilik Joystick Dugme Denetleyicisi Controller Control Control Buttoncontrole Joystick Aliexpress

Pleksiglas Robot Kol Plastik Parcalari Ucuz Fiyata Al Robocombo

Arduino Joystick Robotic Arm Youtube

Arduino Ve Android Kontrollu Robot Kol Yapimi Proje Hocam

Ogrenme Fonksiyonuna Sahip Hareket Kopyalayan Robot Kol Yapimi

Arduino Joystick Ile Servo Motor Kontrolu Proje Hocam
3 Boyutlu Akilli Arduino Robot Kol Yapimi
20 En Iyi Robotik Kol Goruntusu 2020 Arduino Koltuklar Robot
